
Le système robotisé da Vinci® est un micromanipulateur assisté par ordinateur utilisé dans le cadre d’intervention chirurgicale. Le système est développé et commercialisé par la société Intuitive Surgical (Société USA). L’objectif d’un tel système est d’optimiser le geste du chirurgien et non pas de remplacer ce dernier.
Description du système robotisé da Vinci®
Le système robotisé Da Vinci® d’Intuitive Surgical® est constitué de (Figure 1) :
- une console opératoire, comprenant un écran de visualisation et des manettes de commande (télémanipulateurs) et devant laquelle le chirurgien s’assoie pour opérer ;
- trois ou quatre bras robotisés (selon le modèle) qui exécutent les mouvements commandés par l’opérateur et à l’extrémité desquels se trouvent des instruments chirurgicaux stérilisables et un endoscope ; les bras sont fixés sur un pied unique (Figure 2, Figure 3) ;
- un système informatique sécurisé, qui permet la transmission des données échangées entre la console et le bras du robot.
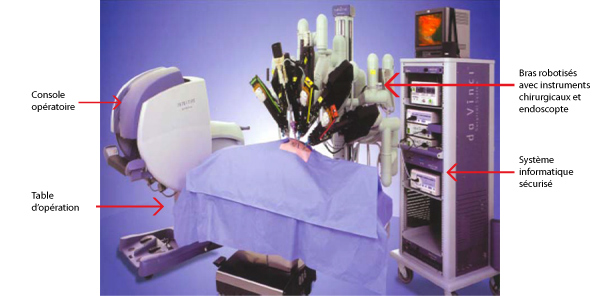
Figure 1 – Le robot Da Vinci® (console, bras robotisés et système informatique sécurisé)
Source : image Intuitive Surgical

Figure 2 – Instrument chirurgical
Source : image Intuitive Surgical

Figure 3 – Endoscope
Source : image Intuitive Surgical
Le fonctionnement du système robotisé da Vinci®
Lors d’une intervention, le chirurgien est assis derrière la console et visualise le champ opératoire à l’aide de l’écran de contrôle. L’endoscope qui se trouve à l’extrémité d’un bras est équipé d’une double caméra, permettant une vision en trois dimensions. Le chirurgien contrôle à distance le mouvement de l’endoscope à l’aide d’une pédale (Figure 4).

Figure 4 – Le robot da Vinci® en situation en salle d’opération
À droite, un infirmier prépare les bras du robot.
Le chirurgien pose ses mains sur les manettes de commande (télémanipulateurs), qui transcrivent ses mouvements en impulsions électriques et les transmettent aux bras articulés et aux instruments chirurgicaux (Figure 5).
 Figure 5 – Manette de commande (télémanipulateur)
Figure 5 – Manette de commande (télémanipulateur)
Le système informatique sécurisé vérifie en permanence la précision des informations et arrête automatiquement les mouvements du robot à la moindre anomalie ou dérive détectée2.
L’originalité du système robotisé Da Vinci®
L’originalité du système robotisé Da Vinci® repose sur les caractéristiques suivantes :
- Des instruments chirurgicaux flexibles, qui reproduisent la dextérité de l’avant bras et du poignet du chirurgien sur le site opératoirequi permet de réaliser des mouvements avec 7 degrés de liberté (figure 6) ;
 Figure 6 – Dextérité des instruments des bras du robot da Vinci®
Figure 6 – Dextérité des instruments des bras du robot da Vinci®
- Un système de filtre des tremblements et des éléments parasites, qui permet un mouvement parfaitement stable ;
- Un endoscope, permettant la visualisation en trois dimensions du champ opératoire et notamment la profondeur du champ opératoire et des zones difficiles à visualiser en situation de laparotomie2 ;
- Un système permettant aux gestes du chirurgien de ne pas apparaitre inversés sur l’écran de contrôle contrairement aux techniques de laparoscopie traditionnelle ;
- De plus, la console est équipée d’un siège ergonomique et d’un repose-front ce qui permet au chirurgien d’opérer dans des conditions confortables et sans sensation de fatigue physique.
Ainsi, le système robotisé Da Vinci® permet de réaliser des actes chirurgicaux avec une grande précision.
L’avenir, le futur proche de la Robotique
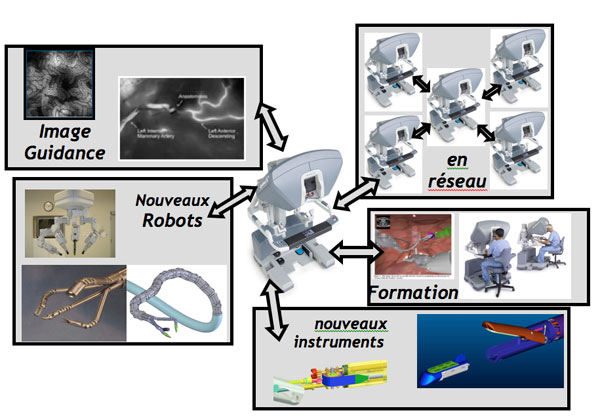
La formation à distance

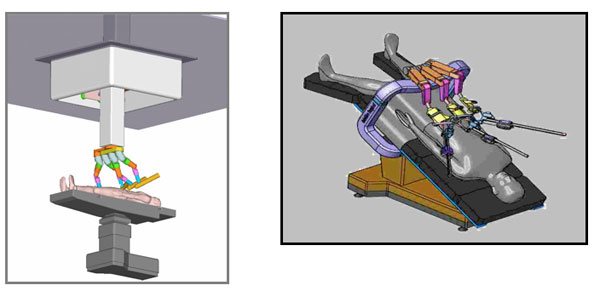
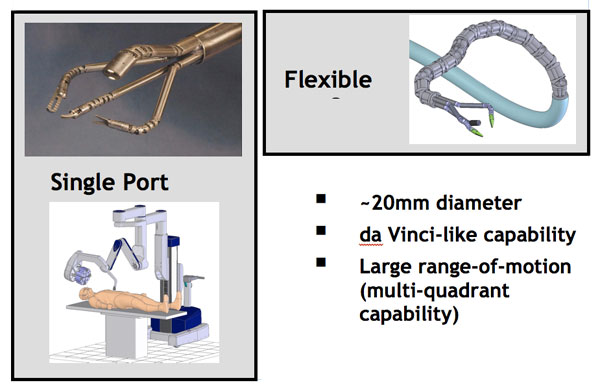
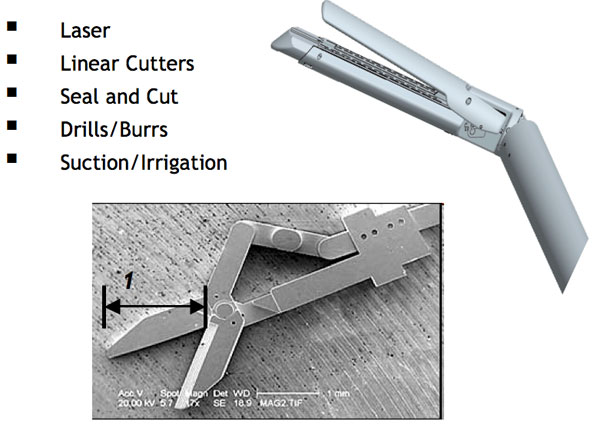
les nouveaux robots et instruments
Pour plus de renseignements : le site Da Vinci